Team Two/Final Paper
From Maslab 2011
(Difference between revisions)
(→Vision) |
(→Electrical Design and Sensors) |
||
| Line 10: | Line 10: | ||
==Electrical Design and Sensors== | ==Electrical Design and Sensors== | ||
| + | |||
| + | '''Motor Controllers''' | ||
| + | |||
| + | '''Batteries''' | ||
| + | |||
| + | '''Sensor Choice''' | ||
==Software Design== | ==Software Design== | ||
Revision as of 01:44, 26 January 2011
Contents |
Team Members
Overview
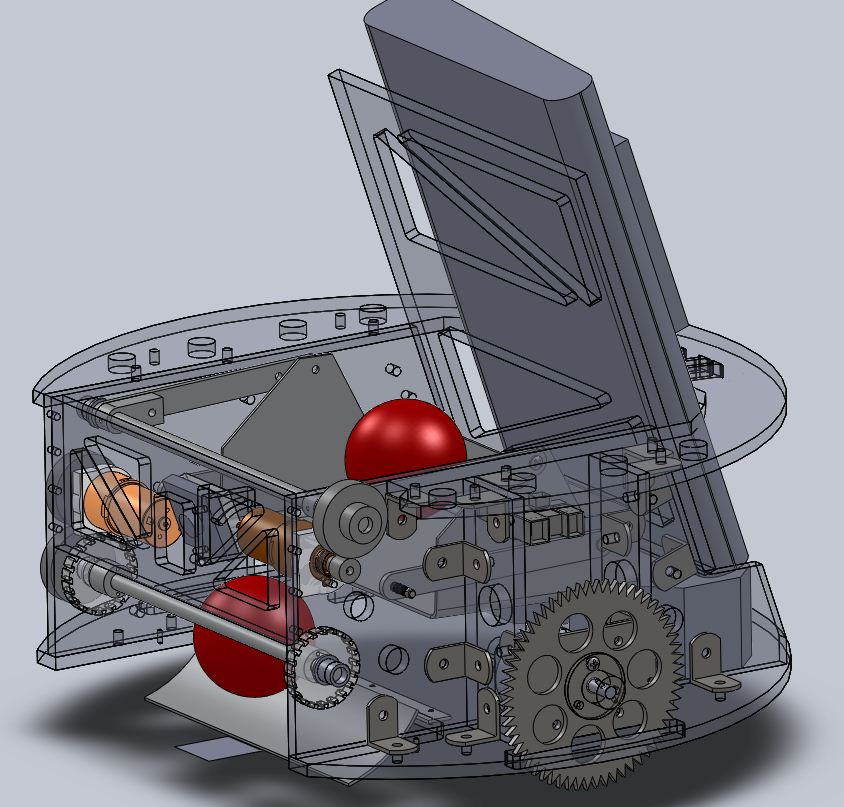
Mechanical Design
Our robot was designed for robustness and reliability.
Electrical Design and Sensors
Motor Controllers
Batteries
Sensor Choice
Software Design
Architecture
cathy
vision driven
color calibration
state machine with bump detection and timeouts
sensor abstractions
Multi-threading
cathy issues?
States
cathy
what states
timeouts
Vision
cathy
color calibration
data structures
botclient
documentary mode
Wall following
stan
Stuck detection
stan
Testing
Testing suite
cathy
Mechanical Issues
Electric Issues
Software Issues
cathy & stan
multi-threading
wall following
stuck detection
Performance
Suggestions
Photos
Detail5.JPG